Ce
cours présente les concepts, algorithmes et techniques utilisés en
Vision par ordinateur pour reconstruire la géométrie 3d d'une scène,
une fonction essentielle à la navigation des robots, qu'elle soit
réactive (éviter les obstacles, trouver la voie praticable) ou
planifiée (cartographier un environnement). Au-delà des robots,
cette fonction est également utilisée en Géographie numérique
(construire un modèle numérique de terrain) ou en urbanisme
(construire la maquette numérique d'un quartier ou d'un bâtiment).
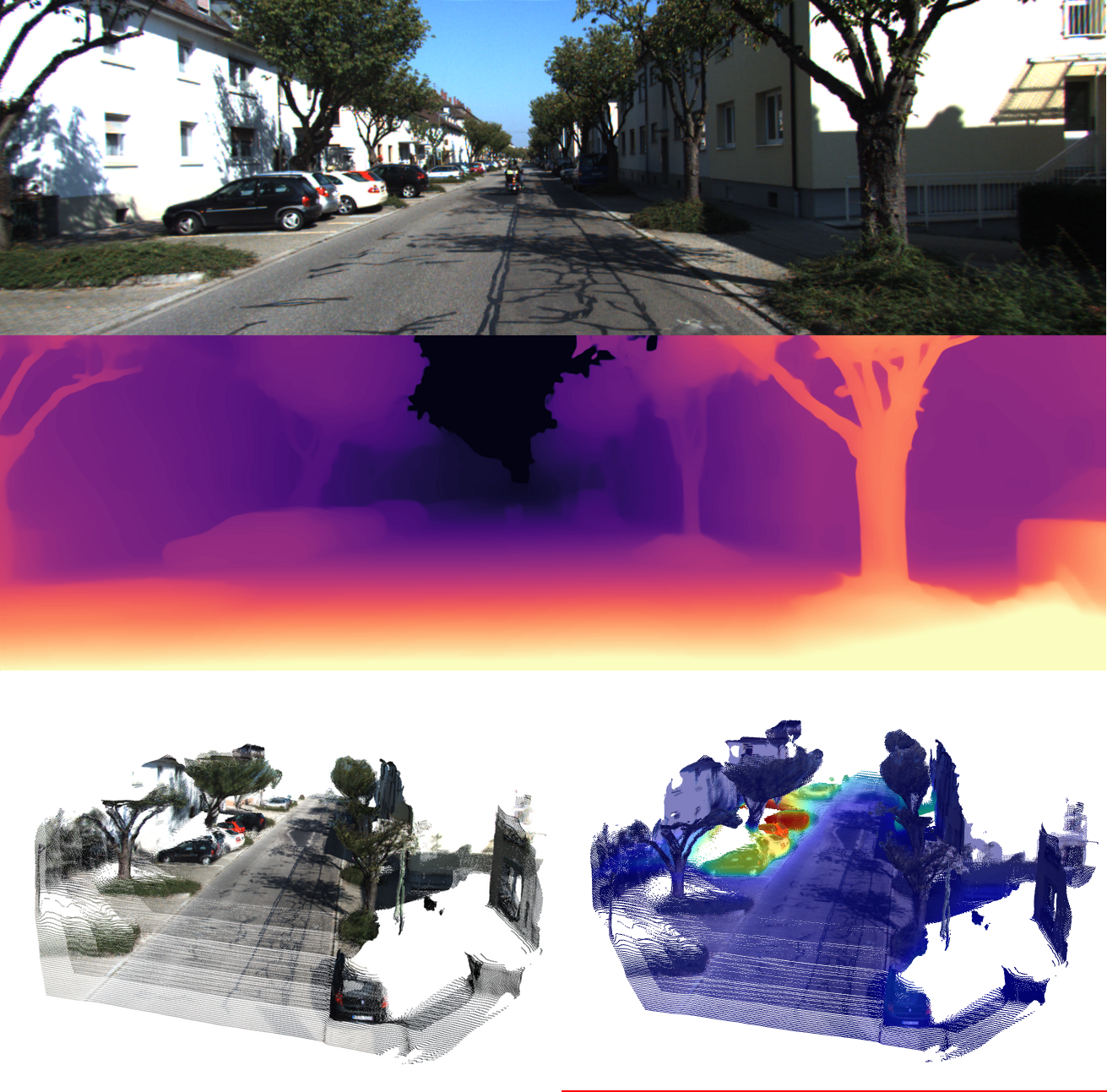
Les capteurs 3d spécifiques sont présentés (d'abord les différentes technologies de caméras 3d, puis les Lidar pour l'acquisition de nuages de points), cependant l'accent est mis dans ce cours sur les méthodes de reconstruction 3d à partir de vidéos RGB monoculaires.
Les approches analytiques font l'objet de 2 séances, où l'on aborde la géométrie multi-vues des caméras, et l'estimation des homographies et de la matrice fondamentale.
Une séance est dédiée aux approches par apprentissage, permettant de prédire une carte de profondeur à partir de vidéos monoculaires avec des réseaux profonds, avec ou sans vérité terrain.
Une fois obtenu un nuage de points 3d pour chaque pose de capteur (avec un Lidar, ou bien avec une carte de profondeur estimée), finaliser la reconstruction suppose de filtrer, simplifier, et mettre en correspondance différents nuages, c'est l'objet de la partie traitement et analyse des nuages de points.
Ce cours s'appuie sur les connaissances de base en images (MI204) qui en forment les pré-requis :
https://perso.ensta-paris.fr/~manzaner/Cours/MI204/
Les capteurs 3d spécifiques sont présentés (d'abord les différentes technologies de caméras 3d, puis les Lidar pour l'acquisition de nuages de points), cependant l'accent est mis dans ce cours sur les méthodes de reconstruction 3d à partir de vidéos RGB monoculaires.
Les approches analytiques font l'objet de 2 séances, où l'on aborde la géométrie multi-vues des caméras, et l'estimation des homographies et de la matrice fondamentale.
Une séance est dédiée aux approches par apprentissage, permettant de prédire une carte de profondeur à partir de vidéos monoculaires avec des réseaux profonds, avec ou sans vérité terrain.
Une fois obtenu un nuage de points 3d pour chaque pose de capteur (avec un Lidar, ou bien avec une carte de profondeur estimée), finaliser la reconstruction suppose de filtrer, simplifier, et mettre en correspondance différents nuages, c'est l'objet de la partie traitement et analyse des nuages de points.
Ce cours s'appuie sur les connaissances de base en images (MI204) qui en forment les pré-requis :
https://perso.ensta-paris.fr/~manzaner/Cours/MI204/
